| Wyvern Semiconductors | Expert in Digital IP Solutions |
|
Reference Manual

abstractA C/C++ instruction set simulator model of the LatticeMico32 soft CPU core is presented. In addition to the core model, with both a C++ and C application programming interface, described are a test platform excutable with a suite of tests, a GDB remote debug interface, and a case study for an embedded Linux system based around the model, to demonstrate its capabilities. The code for both are included, with the ISS source, in a downloadable package on GITHUB, and released under GPL v3.0. The internal design is also described to allow ease of extensibility by third parties, and for informative purposes. Finally, details are given on how to use the ISS in a multi-processor system model.
Contents
Introduction
The intent of presenting this model is mostly informative and (hopefully) it tries to strip down fundamental processor system concepts into simple, easily digestable pieces, whilst still ending up with a sufficiently complex system that has all the main concepts contained within it, such that an OS can be booted (µClinux), and the model can interface to third party IDEs and debugging systems (such as Eclipse, via GDB). More complex concepts, such as caching, pipelining and memory protection and management (for multi-threading etc.), are skipped for clarity, as these might be considered as optimisations that have been added to processor systems for reasons of speed and ease of use since microprocessors first appeared (which did not have these), and are not the foundational constructs of a processor based system. The more advanced topics will have to wait for another article.
The LatticeMico32 processor was chosen for this project as having a straightforward architecture that is more easily understood compared to, say, a 32 bit ARM processor, but is still a modern 32 bit embedded processor currently used and supported, with a toolchain that is relevant to other current systems developments, and is thus transferable knowledge. The LatticeMico32 already has an ISS built-in to the toolset supplied by Lattice Semiconductors, and this model is not meant to replace it. However, by having source code freely available, with clarity of understanding at its heart, the model is readily modified for non-standard systems, or extended for additional peripherals, or even simply experimented with to aid understanding of the system as it stands.
The package includes the source code for the instruction set simulator, modelling the Lattice Mico32 soft-CPU. The core model is coded as a single C++ class (lm32_cpu), which can be, and is meant to be, integrated into other system models. It implements all the non-optional features, and most of the optional features of that core. It has both C++ and C compatible APIs and is extensible to include additional modelled functionality. A test platform (cpumico32) is bundled in the package, as is a case study of an embedded Linux system (lnxmico32), based around the model. An interface for remote debugging via GDB (and, by extension, third party IDEs, such as Eclipse) is also supplied. The source is free-software, released under the terms of the GNU licence (see LICENCE included in the package, available on github). Features
Included Features: • All supported core instructions • All h/w modelled for configurable instructions - Multiplier - Divider - Sign extender - Barrel shifter • Configurable internal memory • All h/w debug break- and watchpoints modelled • Cycle count functionality • Configurable 'hardware', as per the Mico32 • Run-time and static disassembly • Data and Instruction caches for timing model • Optional Data and Instruction TLBs • Extensibility via callbacks - Intercept memory accesses - Regular callback with ability for external interrupt generation - JTAG register access callback • Configurable execution break points - On a given address - After a single step, or clock tick - After a fixed number of cycles - On 'hardware' debug break point • Access to internal Memory • Access to internal state • Compatible with GNU tool chain (lm32-elf-xx) • Both C++ and C linkage interfaces available • Separate GDB remote debug interface code is included - Supports both virtual serial and TCP socket connections
Features Not Included:
• JTAG interface model (but callback interface included) • User definable instructions
The code is a simple exercise in modelling a RISC based embedded CPU. It comes with absolutely no warranties for accuracy, or fitness for any given purpose, and is provided 'as-is'. Hopefully it is useful for someone, and feel free to extend and enhance the model, and maybe let me know how it's going.
Simon Southwell (simon@anita-simulator.org.uk) Cambridge, August 2016 Source files
Listed and described here are those source files that make up the Mico32 ISS library (e.g. libmico32.so). These are the source files needed for integration into other C or C++ environments. The source files for the example executable and test bench program, cpumico32, are not described in this document (i.e. cpumico32.cpp, cpumico32_c.c and lm32_get_config.cpp). These are still freely available for use, under the terms of the GNU public license, but do not form part of the core functionality of the simulator, and are not documented.
The main header files comprise those listed below:
• src/lm32_cpu.h • src/lm32_cpu_hdr.h • src/lm32_cpu_mico32.h
For integrating the model with external programs only lm32_cpu.h needs be included in source code that references the API, but this header makes reference to lm32_cpu_hdr.h, which will need to be in the include path when compiling. The lm32_cpu_mico32.h header is only used by the internal source files, and includes all the definitions and types needed by this code. The lm32_cpu.h header has the major class definition for the model (lm32_cpu), and the other header, lm32_cpu_hdr.h, has all the definitions for need by external programs using the API.
The following listed files define the methods that belong to the class lm32_cpu, and headers specific to those methods. The class methods are split over several files, but all belong to the single lm32_cpu class.
• src/lm32_cpu.cpp • src/lm32_cpu_inst.cpp • src/lm32_cpu_elf.h • src/lm32_cpu_elf.cpp • src/lm32_cpu_disassembler.cpp
The entry point methods and program flow methods are all defined in lm32_cpu.cpp, whereas the instructions themselves have methods defined in lm32_cpu_inst.cpp. There is almost a one-to-one mapping of LM32 instructions and the instruction methods, but a couple of methods double up for multiple instructions. The processing of the ELF program files are handled in methods defined in lm32_cpu_elf.cpp, with its header file as lm32_cpu_elf.h. Code disassembly is handled by methods in defined in lm32_cpu_disassembler.cpp.
A cache is implemented, for timing modelling purposes, and is instantiated in the main class for both the data and instruction caches. It is defined in the following files:
• src/lm32_cache.h • src/lm32_cache.cpp
Basic MMU support is added with models of data and instruction TLBs (translation lookaside buffers). These are modelled on the TLBs added to the LatticeMico32 processor for the MilkyMist project by M-Labs [7]. The functionality is defined in the following files:
• src/lm32_tlb.h • src/lm32_tlb.cpp
A C linkage interface is provided, for those requiring to integrate the model into a C environment, and this is defined in the following files:
• src/lm32_cpu_c.h • src/lm32_cpu_c.cpp
For external programs interfacing to the model over the C interface, the lm32_cpu_c.h header must be included in source code making reference to that API, in place of lm32_cpu.h. The lm32_cpu_hdr.h still needs to be in the include path, when using the C interface. Building code
Included in the package is a makefile to build the code under Linux or Cygwin, and support is also provided for MSVC 2010. Under the UN*X systems, by default (i.e. simply typing 'make') it will build the following:
• cpumico32 • libmico32.a • libmico32.so
The first is an executable (see man/cpumico32.1) for running simple programs, particularly the self-test programs provided in the package-see Testing section below. The next two are a static and dynamic library respectively, and are the libraries an external program can use to link with the model, choosing the appropriate one depending whether static or dynamic linking was most appropriate for the particular application. The API for the libraries, and its use, is described in the API section below.
The makefile also, by default, builds the code with debug information (with g++ option -g) and as position-independent code (with option -fPIC-though this option is not needed in Cygwin). These are defined in the make variable 'COPTS', and can be overridden at the make command line. By default, the model is 'big endian', just like the Lattice processor. For variants that have been modified to be 'little endian', the model can be compiled with a COPTS value that includes the definition option "-DLM32_LITTLE_ENDIAN".
No code coverage information is included by default, but the 'COVOPTS' make variable can be set at the command line to add, say, 'gcov' coverage information in the build (e.g. COVOPTS="-coverage"). If 'lcov' is available, the HTML output can be generated with 'make coverage', after the tests have been executed. The output is placed in a directory cov_html/.
Support for MSVC 2010 is provided, with a solution file (.sln) in the msvc/ directory, along with the minimal set of project files to read in to the MSVC 2010 IDE, and compile and run the model, but if MSBuild.exe is in the PATH under Cygwin, then the makefile has support to build from the command line with 'make MSVC'. The MSBuild.exe executable is part of Microsoft.NET, and thus can normally be found in a directory (for example, under Cygwin) such as:
<cdrive_path>/Windows/Microsoft.NET/Framework/v4.0.30319
The <cdrive_path> is the Cygwin path to the windows disk (most likely /cygdrive/c) and the final directory name will depend on the particular version of Microsoft NET installed. For 64 bit machines, a 64 bit version of the executable will be under Framework64.
By default, a make build for MSVC builds a 'Release' executable, which is placed in the same directory as for the other builds of the makefile. If a 'Debug' version is required, then the default can be overridden via the MSVCCONF make variable-i.e.:
make MSVCCONF="Debug" MSVC
Like the make for UN*X, the MSVC build produces a cpumico32.exe executable, but only a single library, libmico32.dll. API
The API to the model is a C++ interface (though a C interface is provided-see C Linkage Interface section below), that consists of a single object (of class lm32_cpu, as defined in lm32_cpu.h) that has a set of methods for configuring the model, setting control of program flow, and running executable code. Definitions are provided in lm32_cpu_hdr.h needed to communicate with some of these methods, and set their parameters. This is all described in the sections to follow. In summary, the methods are:
lm32_cpu (int verbose, bool disable_reset_break, bool disable_lock_break, bool disable_hw_break, bool disable_int_break, bool disassemble_run, uint32_t num_mem_bytes, uint32_t mem_offset, int mem_wait_states, uint32_t entry_point_addr, uint32_t cfg_word, FILE* ofp, lm32_cache_config_t* p_dcache_cfg, lm32_cache_config_t* p_icache_cfg, uint32_t disassemble_start)
int lm32_run_program (const char* elf_fname, int run_cycles, int break_addr, int exec_type, bool load_code)
void lm32_register_int_callback (p_lm32_intcallback_t callback_func) void lm32_register_ext_mem_callback (p_lm32_memcallback_t callback_func) void lm32_register_jtag_mem_callback (p_lm32_jtagcallback_t callback_func)
void lm32_reset_cpu (void)
void lm32_set_verbosity_level (int level) lm32_time_t lm32_get_current_time (void) void lm32_set_configuration (uint32_t word) uint32_t lm32_get_configuration (void) lm32_time_t lm32_get_num_instructions (void)
uint32_t lm32_read_mem (uint32_t byte_addr, int type) void lm32_write_mem (uint32_t byte_addr, uint32_t data, int type, bool dis_cyc_cnt)
void lm32_dump_registers (void) lm32_state lm32_get_cpu_state (void) void lm32_set_cpu_state (lm32_state new_state) void lm32_set_hw_debug_reg (uint32_t address, int type) void lm32_set_gp_reg (uint32_t index, uint32_t value)
Initialisation
The model object is created by instantiating a variable of type lm32_cpu class, or creating via 'new'. The constructor, lm32_cpu(), has a set of inputs for the initial configuration of the model.
Execution and breakpoints
Once a model object is created, a program can be run via the lm32_run_program() method. At its simplest, it is called with a program file name to load and execute, and run 'forever'. However, other features are controllable on calling to limit the amount of execution. The call to the method can also return due to other break events that were specified at initialisation (see Initialisation section above). A returned value indicates why the lm32_run_program() exited. The parameters to the methods are described below:
Return Value
The lm32_run_program() method returns one of several values to indicate why it returned.
· LM32_USER_BREAK: returned having reached the user specified break address, set at configuration or passed as a parameter when calling lm32_run_program(). · LM32_SINGLE_STEP_BREAK: returned whilst single stepping (i.e. exec_type argument was set as LM32_RUN_SINGLE_STEP when lm32_run_program() called · LM32_TICK_BREAK: returned whilst executing with an exec_type of LM32_RUN_TICK · LM32_RESET_BREAK: returned if the model was externally reset via lm32_reset_cpu() (and reset breaking was not disabled) · LM32_LOCK_BREAK: Reached a program 'lock' condition (and lock breaking was not disabled) · LM32_DISASSEMBLE_BREAK: reached the end of the program during disassemble mode (see "Disassembled Output" section below) · LM32_HW_BREAKPOINT_BREAK†: a hardware breakpoint fired, when breaking on hardware debug events were enabled. · LM32_HW_WATCHPOINT_BREAK†: a hardware watchpoint fired, when breaking on hardware debug events were enabled. · LM32_INT_BREAK: an external interrupt was active, when breaking on interrupt events were enabled. · LM32_BUS_ERROR_BREAK†: an instruction or data bus exception fired. · LM32_DIV_ZERO_BREAK†: a divide-by-zero exception fired.
† Note: the method will return with these values regardless of whether interrupts are enabled in the IE register. This allows for non-intrusive debugging. The calling function must process the returned value and decide what the appropriate action is. The state of the IE register is available to the calling routine via the lm32_get_cpu_state() method, if required. As the external interrupts are level sensitive, this may cause the method to return for each executed instruction that the interrupt(s) are asserted.
Run-time configuration and status
Some methods are provided for inspecting status and setting configuration at run-time, i.e. after lm32_run_program() has returned.
Reset event
Callbacks
The ISS is a model of a processor core, and its main usage is as a component in a larger system level model. It has an internal memory model for convenience and to aid stand alone testing, but it is via the callbacks that the model can be extended or integrated into a system model of arbitrary complexity. The model supports three types of user defined callbacks that can be registered with the model. One is for calling at each memory access that the CPU performs, the second is called at regular intervals (from once each instruction boundary, to as long as specified in a wait or sleep period). The third is to allow a JTAG interface to be implemented as an add-on, and is invoked whenever the model accesses the JTX or JRX registers.
The main extension is to map peripherals (including more memory, if desired) into the memory space via the external memory callback function, trapping accesses to addresses with memory mapped peripheral registers and implementing the functionality.
To take a trivial example, to model a system that has a serial output then the external memory callback mechanism would seem to be what you need. It is there to allow modelling of hardware that is external to the lm32 model itself. By registering a callback function with the method lm32_register_ext_mem_callback(), then all accesses to anywhere in the memory space by the model will call this registered function first, with the address and any write data value (assuming a write). Taking an example, if you modelled a serial port with an output register located at, say, 0x80000000 or wherever, then the callback function can test for this address, and print a character to the screen of the value of the lowest byte of the data word passed in, returning a wait-state count for the access (any value of 0 or more). For all other addresses the callback function returns LM32_EXT_MEM_NOT_PROCESSED to allow the model to handle the access. This concept can be extended to model any hardware with a memory mapped register set, accessible by the processor. You can try this mechanism for yourself by registering your own external memory callback function and have it print out all of the memory read and write accesses it sees (returning LM32_EXT_MEM_NOT_PROCESSED so that the model can continue). You'll see it accessing all the program locations and any other locations it is trying to access.
For functionality that isn't a memory mapped register, but can generate an interrupt, or requires updating on CPU time, then the interrupt callback can be used. This can be called up to every instruction, or at longer intervals, and it can generate an interrupt upon returning (or not). Taking the serial output port as an example, if it is required that the peripheral generates an interrupt some cycles after a byte is transmitted, then, after a sufficient number of calls to the int callback, from the register write (via the external memory callback), the callback can return a value, indicating an interrupt on one of the interrupt pins.
Note that these two callbacks are shared amongst all modelled peripherals, and the callbacks will have to do initial decoding. For the external memory accesses, this is just decoding incoming addresses, perhaps doing a page decode to identify a particular peripheral, and then calling a model function which does the rest of the decode. For the interrupt callback, then it is envisaged that all peripheral models are called at every cycle, amalgamating any interrupts returned from the peripheral model functions.
A special callback is implemented to handle JTAG accesses, via the JTX and JRX registers. This is simply a hook for functionality that isn't implemented in the model, should anyone wish to add support for this.
The three callback registration functions are described below:
Internal memory access
The API provides direct access to the model's internal memory, via two methods. Using these methods will also invoke any external memory callback function, and so can be used to peek and poke memory areas implemented externally via the callback.
There are no safe guards on the calling of these memory access functions, and all internal memory is accessible from them. However, accessing invalid areas of memory will cause fatal exceptions. Use with caution. Internal state access
Three methods are provided to give access to internal register state of the model, either to the output stream, or returned to the calling program.
C Linkage Interface
A C linkage API is provided as an alternative to the C++ interface, for those who have a C environment that they wish to integrate the model into. The API is purposely as similar to the C++ API as possible, as it has been described above. There is a one-to-one correspondence to the C++ methods, with all the C API functions called lm32c_<c++ equivalent suffix>, and each has an additional parameter, except for the initialisation function, as explained below.
The constructor is replaced with a function lm32c_cpu_init(). The parameters are the same as for the C++ constructor, only with the Boolean types now defined to be of type 'int'. Thus their default values are no longer 'true' or 'false', but the API defines values TRUE and FALSE, which replace these. The function returns a handle to a unique object, of type lm32c_hdl, which must be saved, as all the other API functions require it to access the initialised model's instantiation. This allows for multiple instantiations of the model.
All the other C++ methods have an lm32c_xxxx equivalent, with identical parameters, except that a new first parameter must be given, which is the handle returned by lm32c_cpu_init(). For example, if the handle has been saved in a variable lm32Hdl of type lm32c_hdl, then a reset call is now lm32c_reset_cpu(lm32Hdl), in place of the C++ method lm32_reset_cpu(), described in the above sections. The lm32c_get_cpu_state() function returns a structure of type lm32c_state, rather than the class lm32_state, but the field names are identical. The full list of C linkage functions is thus:
The API is defined in the source file header lm32_cpu_c.h, which must be included in code using the C API. Disassembled Output
The model can output (to 'ofp') fully disassembled output in one of two ways. Either the disassembled output can show program flow, during a normal execution of code on the model, or it can simply display a disassembled output of the specified ELF executable file.
Normal execution flow disassembly is instigated either by setting the constructor's 'verbose' parameter, or by calling lm32_set_verbosity_level(). When verbosity is enabled the output looks something like the example fragment shown below:
0x01ac: (0x2b9f0034) lw ba, (sp +00052) @433 0x01b0: (0x379c0038) addi sp, sp, 000056 @434 0x01b4: (0xc3e00000) b ba @435 * 0x0304: (0x5e8c00a8) bne r20, r12, 0000672 @439 0x0308: (0x9a94a000) xor r20, r20, r20 @440 0x030c: (0x38013101) ori r1, r0, 0x3101 @441 0x0310: (0x30220000) sb (r1 +00000), r2 @442 0x0314: (0x5e8000a4) bne r20, r0, 0000656 @443 0x0318: (0x38010144) ori r1, r0, 0x0144 @444 0x031c: (0xd1010000) wcsr DC , r1 @445 0x0320: (0x9a94a000) xor r20, r20, r20 @446 0x0324: (0x38013101) ori r1, r0, 0x3101 @447
The first field displays address of the instruction (i.e. the value of the PC register). When the program flow is disrupted (due to a branch, call, or exception), this field shows '*', and the rest of the line is left blank, to ease finding the jumps when debugging. Field 2 gives the raw instruction value being executed followed by the actual disassembled instruction in field 3. The current cycle count is displayed in the last field. This mostly increases by one, but for instructions that take more cycles to execute, or are stalled etc., the value jumps by a larger amount. In the example above the branch instruction takes 4 cycles to issue, and so the cycle count jumps from 435 to 439.
The pure disassembled output is specified by setting the disassemble_run parameter of the constructor, and has nearly identical output to that of the run-time output.
0x02f8: (0x9a94a000) xor r20, r20, r20 0x02fc: (0x38013101) ori r1, r0, 0x3101 0x0300: (0x10220000) lb r2, (r1 +00000) 0x0304: (0x5e8c00a8) bne r20, r12, 0000672 0x0308: (0x9a94a000) xor r20, r20, r20 0x030c: (0x38013101) ori r1, r0, 0x3101 0x0310: (0x30220000) sb (r1 +00000), r2 0x0314: (0x5e8000a4) bne r20, r0, 0000656 0x0318: (0x38010144) ori r1, r0, 0x0144 0x031c: (0xd1010000) wcsr DC , r1 0x0320: (0x9a94a000) xor r20, r20, r20 0x0324: (0x38013101) ori r1, r0, 0x3101
The main difference here is that there is no cycle count (as this has no meaning in this context), and there will be no breaks in address as the disassembling runs from the lowest to the highest address (of text areas) linearly.
Timing Model
The ISS makes an approximation of time using the issue cycles and result cycles associated with each instruction, as defined in the LatticeMico32 reference manual [1]. Each instruction executed will advance the cycle count by at least its issue cycles, as the next instruction cannot be executed before this time. In addition, if it updates a register, then the result cycles value plus the current cycle count is stored for the target register. This is the earliest time that a future instruction can access this register. When an instruction is executed, its source registers (RY and, if applicable, RZ) have their availability times checked, and the cycle count is advanced to the time of the latest register's availability. This timing model does not take into account branch prediction, and uses the issue cycle numbers for 'taken' and 'not taken' unmodified, as defined in the reference manual [1]. The internal cycle count is also used as the basis for the CC register value. Since this register can be changed by software, but the cycle count needs to run continuously, the CC value is emulated by keeping a track of the offset from cycle count and the last programmed value, such that a read of the CC register will be correct, whilst still being based on the internal cycle count. This means only a single source is used for all timing.
The model can be advanced by single cycles, as well as single instructions, to allow the model to be called at a regular clock tick count. At each instruction the cycle count is advanced by one or more, depending on the instruction. At each clock 'tick', the clock time is advanced by one clock cycle. Only when the clock tick count matches the instruction cycle count is the next instruction executed. This is also useful when multiple instances of the model are instantiated, as they can be kept in synchronisation, by calling with a clock 'tick' rather than single-stepping, and their internal sense of time will advance at the same rate and remain locked, with just minor differences due to instruction execution granularity.
CachesThe model implements configurable caches for the data and instruction fetches. The cache models are for timing purposes only, and do not actually store data within them, but keep a record of which addresses are cached. If an access to a cached region of memory is made, whether to internal memory or to a region mapped by an external memory access callback function, the data is still accessed as normal, but the reported timing wait states are ignored if a cache hit, and single cycle accesses of the cache are used to update time instead. If a cache miss, however, the memory access wait states (if any) are scaled by the number of words accesses required to fill the cache line, as these would have been fetched by the cache. When no cache is configured, the wait states from memory callbacks or internal memory accesses are used unmodified to update time.
By default, the caches are disabled (i.e. the configuration is for no caches implemented). To enable caching, the configuration register (CFG) must be modified at instantiation or via the lm32_set_configuration() method (see API section above).
Source Code Architecture
It is not the intention to go into minute detail for the internal architecture of the model here, but a brief overview of the main program flow, internal state, and major structures is in order, to allow anyone wishing to understand or modify the code enough of a handle, that they can explore the details on their own. Main execution flow
Below is shown some pseudo-code of the main program flow when executing a program. The main lm32_cpu class member functions are shown as "funcname()", and the phrases between "<" and ">" describe local functionality. The indentation of the pseudo-code shows the calling hierarchy as implemented in the code.
lm32_run_program()
<if running from reset...> <load ELF program to memory>
<while no break point reached...>
execute_instruction()
process_exception() <process external interrupts> <if master interrupts enabled...> interrupt() <if interrupt outstanding...> <generate exception>
<fetch opcode from PC location in memory> <lookup decode_table information using opcode> <extract argument fields from opcode>
<if verbose or disassemble_run...> disassemble()
<if not disassemble_run...> <lookup instruction function in tbl_p> <execute instruction function using decode_table lookup data>
<check for break points and flag>
The above pseudo-code is a rough outline only, and doesn't show callback handling, memory accesses, disassembling or instruction execution (though this last is described below, in the Disassembled Output section). Key Model State
The list below show some of the major state used in the model.
• state: Contains all the CPU's modelled registers, e.g. r[32], pc, im etc. There is a field corresponding to each register in the Mico32 CPU, including debug registers. It is of type lm32_cpu::lm32_state. It also carries other persistent state, used by the model, that will need saving for save and restore operations o state.int_flags: bitmapped value indicating pending exception. Each of the bits, from bit 0 to bit 7, corresponds to the exception ID as defined in the reference manual [1]. This is part of the state structure. o state.cycle_count: number of executed cycles since time 0. Note that this is not the number of instructions executed. Instructions that take multiple cycles, increment this count by more than 1. This is part of the state structure. • mem: pointer to internal memory. This can be NULL if none defined, and all memory handled by callback functions. • mem_tag: pointer to internal memory tag that contains debug tag data to mark the access types for internal memory locations. Can be NULL-see mem above. • rt: CPU general purpose registers' next availability times. See the Instruction Functions section below for details of usage. • tbl_p: pointer to table of instruction function pointers. See the Decode Table section below for more details. • decode_table: table of instruction decode information. See the Decode Table section below for more details.
Decode Table
At the heart of the execution of the model is a decode table used for quick lookup of decode information for a given instruction's opcode. The decode table consists of 64 entries with the following structure type:
struct lm32_decode_table_t { const char* instr_name; unsigned instr_fmt; lm32_time_t result_cycles; lm32_time_t issue_cycles; lm32_time_t issue_not_takencycles; unsigned signed_imm;}
It is a constant table, and held in the global decode_table variable, initialised at compilation. The instr_name field is a string for disassembly purposes, whilst the instr_fmt gives information as to the instruction format for that opcode. There are slightly more formats than that defined in the reference manual [1], as quirks of some instructions need uniquely identifying. The definitions in lm32_cpu_mico32.h prefixed "LM32_FMT_" give all the possible values. The three time based fields, correspond to the values of cycle taken for each instruction as defined by the reference manual [1], with an issue count a results count and (if a decision branch) a not taken issue count. The signed_imm field indicates whether any immediate bits of the instruction are signed or not. For instructions with no immediate value, this is a "don't care". An example initialisation for a table entry, for the sextb instruction is shown below:
{"sextb ", INSTR_FMT_RC, 1, 1, 0, INSTR_SE_DONT_CARE}
The table is used during execution of instructions. During decode, a structure is used for constructing decode information, as shown below.
struct lm32_decode_t { uint32_t opcode; uint32_t reg0_csr uint32_t reg1; uint32_t reg2; uint32_t imm; const lm32_decode_table_t* decode; }
This structure is like a form that is filled in as the instruction is processed. The 'opcode' field is set with the raw fetched instruction value, and then the fields are separated into the regXX and imm fields, depending on the instruction type. The type is derived from the last field which is a pointer to an entry in the decode_table, described above. During decode the opcode is used to fetch the decode_table location for the instruction, and the pointer to the entry is stored in the decode field. It is a pointer to this structure that is ultimately passed in to the instruction functions for use in execution the instruction functionality.
The tbl_p pointer of the lm32_cpu class points to a table of 64 entries, corresponding to the 64 opcodes, and contains pointers to functions that will implement that opcode's function. The table's type is an lm32_func_table class, with an array of pointers of type pFunc_t. This corresponds to a member function of lm32_class, with a form "void lm32_<instr_name> (p_lm32_decode_t p)", with the sole argument being a pointer to an object of type lm32_decode_t, as shown above. The table is constructed an initialised in the constructor of the lm32_cpu class. Instruction Functions
The actual instruction execution functions are defined in the source file lm32_cpu_inst.cpp, and all have a similar basic format. An example is shown below for the byte sign extend instruction (sextb).
void lm32_cpu::lm32_sextb (p_lm32_decode_t p) {
if (state.cfg & (1 << LM32_CFG_X)) { cycle_count += calc_stall(p->reg0_csr, NULL_REG_IDX, cycle_count);
int32_t ry = SIGN_EXT8(state.r[p->reg0_csr] & BYTE_MASK);
state.r[p->reg2] = ry; rt[p->reg2] = cycle_count + p->decode->result_cycles;
state.pc += 4;
cycle_count += p->decode->issue_cycles; } else lm32_rsrvd(p); }
The function is passed in a pointer to the decode information looked up in execute(), and filled in with extracted argument fields (e.g. rx, rz indices, or immediate values etc.). As sign extension is an optional feature, the CFG register state (state.cfg) is inspected, and if sign extension is not implemented, then the lm32_rsrvd() instruction function is called instead. Not all instructions are optionally implemented, and these instruction's functions don't have a test like this.
If it is implemented, then the first job is to see if any source registers are stalled. In this case there is only one source register (indexed by p->reg0_csr), and calc_stall() is called that returns a number representing any number of cycles to wait before that source register is available. The 'rt' table has a list of cycle counts indicating when each of the 32 general purpose registers are next available. Any source register for an instruction that has an 'rt' entry in the future (relative to cycle_count) generates a wait state count that is the difference between cycle_count and the 'rt' entry for the register. In the case of instructions with two source registers, the larger of the two calculated wait cycles is returned. This is added to the current cycle_count to effectively delay execution of the instruction.
The value of the register indexed is retrieved from state and signed extended, as required for this instruction's function, into a variable ry. The destination register, indexed by p->reg2, is updated with the ry value, and then the 'rt' table entry for the indexed destination register is updated to contain the cycle time that it will next be available. This is the current cycle_count (with stalling already added), plus the result_cycles for this particular executed instruction, as defined in the decode_table entry passed into the function.
The PC is incremented to the next instruction (for branches this might be to a different address), and the cycle_count incremented by the value of the issue_cycles for the instruction, as defined in the decode_table entry, that was passed into the function via the 'p' pointer.
The 64 opcodes all have an entry in the tbl_p table, and point to a function like that in the above example.
TestingTest Platform
As has been mentioned above, an executable environment, cpumico32, is constructed that instantiates the lm32 model, and provides sufficient control and facilities to allow the model to be fully tested. This includes a command line control interface for configuring the model and testing, as well as a set of callback functions to allow testing of such things as interrupts etc.
Detailed discussion of the code is not undertaken here-the code is not complicated, and inspection of the source should be sufficient-but a brief description of the program's usage is given. The usage message for cpumico32 is as follows:
Usage: cpumico32 [-h] [-g] [-t] [-G <port #>] [-v] [-x] [-d] [-D] [-I] [-n <num>] [-b <addr>] [-r <addr>] [-R <num>] [-f <filename>] [-m <num>] [-o < addr>] [-e <addr>] [-l <filename>] [-c <num>] [-w <wait states>] [-i <filename>] [-T]
-h Display this help message -g Start up in GDB remote debug mode (default: off) -t Specify TCP socket connection for GDB remote debug (default: COM/pty connection) -G Specify COM port to use for GDB remote debug (default: 6) -n Specify number of instructions to run (default: run forever) -b Specify address for breakpoint (default: none) -f Specify executable ELF file (default: test.elf) -l Specify log file output (default: stdout) -m Specify size of internal memory in bytes (default: 65536) -o Internal memory offset (default 0x00000000) -e specify an entry point address (default 0x00000000) -v Specify verbose output (default: off) -x Enable disassemble mode (default: disabled) -d Disable breaking on lock condition (default: enabled) -H Dump opcode statistics on termination (default: no dump) -r Address to dump value from internal ram after completion (default: no dump) -R Number of bytes to dump from RAM if -r specified (default 4) -D Dump registers after completion (default: no dump) -I Dump number of instructions executed (default: no dump) -c Set configuration word value to enable/disable features -w Set the number of wait states for internal memory (default 0) -i Specify a .ini filename to use for configuration (default none) -T Enable internal callback functions for test (default disabled)
For the most part, the command line options map directly to configuration options of the model's constructor, or configuration methods. The options -m, -o, -e, -v, -x, -d, -c, and -w all get mapped to the constructor's inputs unmodified. The -l option specifies an executable filename, which cpumico32 opens for writing, and passes the file pointer to the constructor. The option -g (plus modifiers -G and -t) runs the program in GDB debug mode, which is discussed in the GDB Interface section.
The options -f, -n, -b map to the first three arguments of the lm32_run_program() method (elf_name, run_cycles and break_addr respectively). The exec_type and load_code inputs are controlled internally by the program, with the exec_type value defaulting to LM32_RUN_FROM_RESET, but this can be overwritten by a test program to change its type, via the memory callback function. The program always loads the specified ELF program, but controls loading of the code in case of a break, where lm32_run_program() will be re-entered, but the code does not need reloading.
The options -H, -r, -R, -D and -I all control the post-run calling of debug data dumping. The option -H generates a histogram dump of the number that each of the sixty four opcodes have been executed. The -r and -R has the program dump memory values from internal RAM, via the lm32_read_mem() method, specifying the start address and the number of bytes (always rounded to a whole word). The -D option causes a call to the lm32_dump_registers() method, and -I a call to the lm32_get_num_instructions() method.
As mentioned before, the cpumico32 program has internal callback functions for the three callback that can be registered with the model. These are specific to testing the model, and can have side effects if non-test code is run. Therefore, by default, they are not enabled. when testing, a -T option is specified to enable them.
All of the above configuration command line options, and additional configurations, can be set by using a .ini configuration file. The -i option is used to specify the .ini file to use. Values specified in this configuration file override the default values but, in turn, can be overridden by the command line option, allowing a mix of methods, and final command line control. The default test .ini file, used by model testing, is show below:
; ; INI file used for test. DO NOT EDIT! ;
[program] filename=test.elf entry_point_addr=0
[configuration] cfg_word=0x11203f7
[debug] log_fname=stdout test_mode=false verbose=false ram_dump_addr=-1 ram_dump_bytes=0 dump_registers=false dump_num_exec_instr=false disassemble_run=false
[breakpoints] user_break_addr=-1 num_run_instructions=-1 disable_reset_break=false disable_hw_break=false disable_lock_break=false
[memory] mem_size=65536 mem_wait_states=0 mem_offset=0
[dcache] cache_base_addr=0 cache_limit=0x0fffffff cache_num_sets=512 cache_num_ways=2 cache_bytes_per_line=4
[icache] cache_base_addr=0 cache_limit=0x7fffffff cache_num_sets=1024 cache_num_ways=2 cache_bytes_per_line=4
The first five sections should be fairly self-explanatory, and map to command line options. The two cache sections allow control of the cache configurations that are passed into the model's constructor, which have no command line equivalent, and so can only be modified from default settings with a .ini configuration file. Callback Functionality
The cpumico32 program implements and registers three callbacks with the model in order to allow full coverage in testing the model. It provides a means to generate external interrupts, with a time to fire them, a means to alter the configuration register to dynamically enable or disable hardware features, a means to reset the model, changing the execution type as it does so, and to test JTAG accesses.
These controls (except the JTAG) are implemented by memory mapping 'registers' from location 0x20000000, implemented in the memory callback function, with offsets defined in the source code. An interrupt pattern can be written at offset COMMS_INT_PATTERN_OFFSET, along with a time (relative to current time) at COMMS_TIME_OFFSET. The interrupt callback function, when called will generate an interrupt if any of the pattern bits are set, after the time set by a write to the COMMS_TIME_OFFSET register.
The individual bits of the configuration register (CFG) can be written to via the next set of locally defined offsets (COMMS_NUM_INT_OFFSET to COMMS_WDOG_EN_OFFSET). Note that when reading these locations returns the whole configuration register value, not the individual bit. At an offset of COMMS_RESET_OFFSET, a write will reset the model, as if the reset pin had been activated, and also set the local execution type variable to whatever data value was written, to override the default.
The JTAG callback function implements a simply loopback functionality. JTAG transmit register write loads a value to a local variable, that can be read when the JTAG receive register is read (or the TX register read).
With this functionality and configurability in cpumico32 all features of the model can be exercised, and a set of assembler code tests have been constructed to do just that, detailed in the Test Code section.
GUI for cpumico32
The package comes with a python based GUI for cpumico32 program (as well as the lnxmico32 program, of which more below), if configuring the command lines seems to complicated and cumbersome. When run (e.g., on windows, python3 python/lm32.py), a window appears looking like the following:
The script is located in the python/ directory and is called lm32.py. It uses Python 3, and the tkinter and ttk modules, which are usually bundled with the python package.
All the flags and arguments of the command line can be
controlled from this GUI. The windows will open with the default values of the cpumico32 program, and the
GUI is used to adjust these. It will check for valid inputs, and raise an error
if outside of prescribed limits The program to be run is selected from the menu
under 'File->Open ELF File.' or with the toolbar button
The popup window has two tabs, with one for the binary flags enabling or disabling features, whilst the send has values defining the number of watch- and breakpoints, as well as the number of external interrupts. Updating the flags and values automatically updates the value in the configuration register box.
When configuration is complete, the 'Run' button
By default, the program will search for the cpumico32 executable on the
path, as indicated by the 'executable Dir'
box in the Directories area. This can be changed from the file menu ('File->Executable Folder.'), or from the
toolbar
The output from the running the command is sent to a new window, including the contents of any specified log file. The window will look something like the following figure (where, in this example, registers and number of executed instructions are dumped, and the contents of memory at 0xfffc are printed). The first line in the window is the command that was executed, with the command line options, as a reference for using in scripting etc.
If the Debug button
The menu has a 'Mode' pulldown, where 'Fast Mode' can be
selected, or this can be toggled from the toolbar
Test Code
A set of assembler programs were developed and are provided for execution on cpumico32, that execute a range of self-tests to verify the model. In order to compile and run these tests it is assumed that the LatticeMico System Development Tools and the Lattice Diamond Design Software (required for the Mico tools) are downloaded and installed. These are freely availabe from the Lattice Semiconductor website under the "Support->FPGA Software Home" page.
These tests are all directed tests, but cover nearly all aspects of the model including all instructions and all exceptions. Each program lives in a solitary directory under the directory test/<category>/ and each sub-directory has a single source file, test.s. These tests are self-checking and return a value 0x0000900d in memory location 0x0000fffc if the test passes, or 0x00000bad if it fails (if the program never terminates cleanly, then this value is undefined-but is unlikely to be the pass value). Below is listed the features covered by the tests, and the test directory that contains the test that covers that feature.
Arithmetic instructions
Instruction Covering test location Status
add instructions/add/ Completed addi instructions/add/ Completed sub instructions/sub/ Completed sextb instructions/sext/ Completed sexth instructions/sext/ Completed mul instructions/mul/ Completed muli instructions/mul/ Completed div* instructions/div/ Completed divu instructions/div/ Completed mod* instructions/div/ Completed modu instructions/div/ Completed
Comparative instructions
Instruction Covering test location Status
cmpe instructions/cmp_e_ne Completed cmpei instructions/cmp_e_ne Completed cmpne instructions/cmp_e_ne Completed cmpnei instructions/cmp_e_ne Completed cmpg instructions/cmpg/ Completed cmpgi instructions/cmpg/ Completed cmpgu instructions/cmpg/ Completed cmpgui instructions/cmpg/ Completed cmpge instructions/cmpge/ Completed cmpgei instructions/cmpge/ Completed cmpgeu instructions/cmpge/ Completed cmpgeui instructions/cmpge/ Completed
Shift instructions
Instruction Covering test location Status
sl instructions/sl/ Completed sli instructions/sl/ Completed sr instructions/sr/ Completed sri instructions/sr/ Completed sru instructions/sr/ Completed srui instructions/sr/ Completed
Logical instructions
Instruction Covering test location Status
and instructions/and/ Completed andi instructions/and/ Completed andhi instructions/and/ Completed or instructions/or/ Completed ori instructions/or/ Completed orhi instructions/or/ Completed nor instructions/or/ Completed nori instructions/or/ Completed xor instructions/xor/ Completed xori instructions/xor/ Completed xnori instructions/xor/ Completed xnor instructions/xor/ Completed
Branch instructions
Instruction Covering test location Status
be instructions/branch_cond/ Completed bne instructions/branch_cond/ Completed bg instructions/branch_cond/ Completed bgu instructions/branch_cond/ Completed bge instructions/branch_cond/ Completed bgeu instructions/branch_cond/ Completed b instructions/branch_uncond/ Completed bi instructions/branch_uncond/ Completed call instructions/branch_uncond/ Completed calli instructions/branch_uncond/ Completed
Memory access instructions
Instruction Covering test location Status
lb instructions/load/ Completed lbu instructions/load/ Completed lh instructions/load/ Completed lhu instructions/load/ Completed lw instructions/load/ Completed sb instructions/store/ Completed sh instructions/store/ Completed sw instructions/store/ Completed
Control/Status access instructions
Instruction Covering test location Status
rcsr instructions/csr/ Completed wcsr instructions/csr/ Completed
* Note that the div and mod instructions are listed in the instruction table in the LatticMico32 Processor Reference Manual [1], but are not documented in the instruction descriptions. They are not supported in the GNU assembler either. The implementation in this ISS implementation assumes signed arithmetic and the tests use '.word <opcode>' to insert the instruction into the test that the assembler won't recognise and compile.
Exceptions
Exception Covering test location Status
reset exceptions/instruction/ Completed divide by 0 exceptions/instruction/ Completed system call exceptions/instruction/ Completed break instr exceptions/instruction/ Completed DC.RE exceptions/instruction/ Completed ext interrupt exceptions/external/ Completed rsrvd exceptions/ibus_errors/ Completed instr bus err exceptions/ibus_errors/ Completed disable instr exceptions/ibus_errors/ Completed data bus err exceptions/dbus_errors/ Completed hw breakpoint exceptions/hw_debug/ Completed hw watchpoint exceptions/hw_debug/ Completed Reset Event exceptions/hw_debug/ Completed
ISS user API testing
Test Covering test location Status
Mem callback exceptions/external/ Completed Int callback exceptions/external/ Completed Instr count api/num_instr/ Completed Run-time ctrl covered in cpumico32.cpp Completed HW debug ctrl covered in cpumico32.cpp Completed State access covered in cpumico32.cpp Completed Re-entrance covered in cpumico32.cpp Completed Extnl breaks covered in cpumico32.cpp Completed
Executing Tests
The tests are all run via a 'runtest.sh' script that lives in the test/ directory. Changing directory to 'test/' and running 'runtest.sh' will execute all the tests, giving a pass/fail criteria for each, with a summary at the end. An easier way to execute the tests, especially when doing coverage measurements, is to use the makefile. When building code, a command 'make test' will get the build up-to-date, and then run the test script. The tail end of the output should be something like that shown below:
. . Running test exceptions/dbus_errors PASS Running test exceptions/hw_debug PASS Running test api/num_instr PASS
Tests run : 24 Tests pass: 24 Tests fail: 0
The test script runs cpumico32 with arguments of '-T -r 0xfffc', but additional arguments can be added by setting the environment variable CPUMICO32_ARGS. This must contain a string of valid cpumico32 arguments but, even when valid, it is not guaranteed that testing will pass for all possible argument combinations, so use with care. Coverage
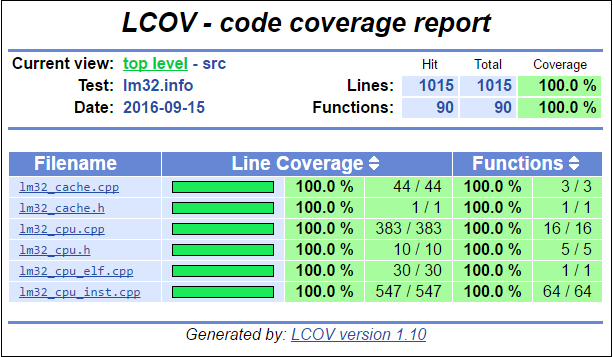
Coverage for the self-tests was performed using gcov and lcov, with support in the makefile. Excluded from the coverage was any disassembler or debug output code as, although this can be covered to a level of 100%, it cannot be verified in an automatic self-test, and it is does not affect the accuracy of the model. Similarly, the cpumico32 top level code was not included, as this is a test/example program, and not part of the model. The core files covered were thus:
• lm32_cpu.cpp • lm32_cpu.h • lm32_cpu_inst.cpp • lm32_cache.cpp • lm32_cache.h • lm32_cpu_elf.cpp
The diagram below shows the LCOV report generated by executing the following commands:
make clean make COVOPTS="-coverage" test make coverage
The report generated is created in the directory cov_html/src, and accessed via index.html.
In order to obtain a goal of 100% coverage, some waivers on lines of code were needed on unreachable lines of code. The exceptions followed 6 broad categories, detailed below:
Checks on parameters etc. that should never fail, and are meant as debug aids for invalid calls from elsewhere in the code, or to protect against invalid values from the API. The following waivers are of this type.
Memory allocation failures that should never happen. Mostly malloc() calls, where a failure here would indicate a system level problem. The following were waivered on this basis:
Code associated with disassembled and debug output, cannot be self-tested. Coverage is possible, but not meaningful. lm32_cpu_disassembler.cpp was wholly excluded, but calls to disassembler methods from the core functionality still needed waiving:
User defined break address handling actually terminates the program, and so cannot be self-tested. The feature is for debug purposes only, in any case, so a waiver was added:
File exception handling also terminates the program, and has no meaning in terms of model accuracy:
ELF file checks only fire with an invalid ELF executable file, and don't affect the model's accuracy for executing a valid ELF file, and so the checks were waivered:
Creation of cache without parameters is not done in the testing, as the tests exercise the various settings (including the defaults) by explicitly setting the cache configurations.
With the above waivers in place, the three listed files, containing all the methods, bar the disassembling, have 100% coverage.
Not Covered
Despite the 100% measured coverage metrics, there are some aspects of the model as yet uncovered by formal testing.
• Various internal memory sizes (all tests run with the default 64K RAM) • Running multiple instances of the model • Accuracy of the timing model against a known good reference GDB Interface
A GDB interface is available for connecting the model with a GDB session via a remote target using a serial connection or a TCP socket. It does this, when configured, by opening a pseudo-terminal, and advertising the device path, or opening a TCP socket on a given port and advertising the port number, which can then by used by GDB to connect to the model using its command target remote <device>. With this arrangement the model then looks like a hardware system connected to the host via a serial interface or TCP/IP connection. One important difference is that the debugging is non-intrusive on the model. Normally for hardware systems connected via a serial port a 'stub' is required to be compiled with the program ([6], section 20.5), along with some user supplied routines that know about the local serial interface protocols etc, that intercept interrupts and communicate with GDB to affect the debugging functionality. With this implementation, with the advatages of visibility within the model, the code being debuggd does not need to be modified with an additional stub.
As mentioned elsewhere, it is expected that the Lattice Semiconductor tool chain for the LatticeMico32 processor is available to use the GDB facility. In particular, the GDB program that must be used is lm32-elf-gdb.
The GDB interface is supported under both Linux and Windows (not tested under Cygwin), but uses slightly different methods between the two for the serial connection (the TCP method is common to both). For Linux it relies on the built-in pseudo-terminal facilities, which are simple to utilise, whereas on Windows third-party code or the implementation of virtual ports and null modems is required. The com0com project has been used to test the windows implementation of the interface, requiring the code to only open a COM serial port, and have the GDB session connect to a paired COM port, with the two communicating via a NULL modem model.
Supported Features
The implementation supports only a subset of the possible GDB commands that can be sent over a remote interface, but it supports more than the minimum required ([6], section E.1).
· Register reads and write (P, p, G and g packets) · Memory reads and write (X, M and m packets) · Single thread control (s and c packets) · Session termination (k and D packets) · Hardware breakpoints (Z1 and z1 packets) · Hardware watchpoints (Z[2-4] and z[2-4] packets)
In addition, soft breakpoints are implicitly supported via the memory read and writes, as GDB substitutes the instruction at the break point by reading (and storing away) the original instruction, and writing a break instruction in its place. The breakpoint interrupt is rasied when the break instruction is reached, just as for hardware breakpoints, and the model returns control to the GDB interface. Before resumption, the original instruction is restored with a further write to memory. Soft breakpoints, in reality, can only work in code that is in volatile memory, where the instructions may be overwritten. In the model all code resides in 'memory' that cab be overwritten, and so this technique can be used on code, even if it is destined for ROM of Flash.
Currently only support for single threaded code is implemented, though this may change in the future.
Usage
The GDB interface is activated using the command line option -g, and is available on both the cpumico32 and lnxmico32 compiled programs. The -G option is available to run in debug mode and specify COM or TCP port to use, if different from the default. The -t option selects the use of TCP rather than serial remote connection to GDB. Specifying any of these three options enables debug mode. The interface itself is not part of the lm32_cpu class, as it it needs to sit on top of the model to control it. It is implemented in the files lm32_gdb.cpp and lm32_gdb.h, and any new projects must include the header and compile in the source code in order to use it. A single function constitutes the API:
int process_gdb (lm32_cpu* cpu, int port_num = LM32_DEFAULT_PORT_NUM, bool tcp_connection = false);
The function expects (at least) a single argument that is a pointer to an lm32_cpu object, which has been created and configured prior to calling the function. The configuration can include the loading of a program in to memory, though this would normally be done from within the GDB session. In the lnxmico32 implementation, for instance, the loading and configuring of the µClinux code is skipped when in GDB mode. A second argument specifies either a COM port or a TCP port number to use, depending on the value of the third argument, which is a flag to use a TCP socket (when true) rather than a serial port (when false, the default). For Linux, if not using TCP, the port number can, and should, be ommited, and it can also be ommited from Windows if the default port number is that required.
When run (e.g. cpumico32 -g, or cpumico32.exe -G6, lnxmic032 -t -G49152) the function will not return until it either losses attachment to a GDB session, or some error has occurred. The function returns 0 for a normal termination, otherwise an error occurred. Once called, for TCP mode, the function opens a TCP socket with the given port number and prints out the port details with a message. E.g.:
LM32GDB: Using TCP port number: 49152
The GDB session uses this port number to connect as <hostname>:<port#>. The hostname can be a host on the network if connecting from a different computer, or localhost, if running on the same machine. Actually, of the host name is ommited (but not the colon), this defaults to being the local host. E.g. from the gdb session:
(gdb) target remote :49152
Similarly, when in serial mode running in Linux, the function opens a pseudo-terminal and prints out the device created. E.g.:
LM32GDB: Using pseudo-terminal /dev/pts/14
Note that this terminal can change between sessions, so it must be noted for the GDB session that must connect to it. Something similar happens for Windows in serial mode, but the terminal is fixed, as specified with -G, or the default value. The Windows message looks something like the following:
LM32GDB: Using serial port /dev/ttyS6
Despite opening a COM port, the value needed by GDB still needs to be of the form of a Linux style device file, as the program uses Cygwin under the hood. With com0com, the device needs to be the paired COM port with that being used by the GDB interface. The ttySn numbering, however is one less that the windows COM port numberings, so ttyS6 refers to COM7. With com0com installed and a COM port pair added, the device manager on windows shows the port pairs simlar to that shown below:
In the example above, the two ports are COM6 and COM7. The GDB interface must use the lower number of the paired port (e.g. COM6), as it advertises the tty equivalent to the COM port that is one value above it (e.g COM7 mapping to /dev/ttyS6).
A typical session might look like the following. In this example one of the test programs is used as the code to debug, and compiled with symbols include
lm32-elf-as -g test.s -o test.o lm32-elf-ld test.o -o test.elf
Assuming that the cpumico32 is run with the -g option (and any other appropriate options, such as -TDIv, say) and has displayed the pseudo-terminal path, as above, then the GDB session, in separate terminal, can be run thus:
lm32-elf-gdb test.elf GNU gdb 6.8 Copyright (C) 2008 Free Software Foundation, Inc. License GPLv3+: GNU GPL version 3 or later <http://gnu.org/licenses/gpl.html> This is free software: you are free to change and redistribute it. There is NO WARRANTY, to the extent permitted by law. Type "show copying" and "show warranty" for details. This GDB was configured as "--host=i686-pc-linux-gnu --target=lm32-elf"... (gdb) target remote /dev/pts/14 Remote debugging using /dev/pts/1 main () at test.s:37 37 xor r0, r0, r0 Current language: auto; currently asm (gdb) load Loading section .text, size 0xec lma 0x0 Start address 0x0, load size 236 Transfer rate: 1888 bits in <1 sec, 236 bytes/write. (gdb) hb _ok7 Hardware assisted breakpoint 1 at 0xc8: file test.s, line 109. (gdb) b _finish Breakpoint 2 at 0xe4: file test.s, line 122. (gdb) c Continuing.
Program received signal SIGTRAP, Trace/breakpoint trap. _ok7 () at test.s:111 111 sexth r2, r2 # Sign extend (gdb) s _ok7 () at test.s:112 112 addi r3, r1, TEST_VAL10 (gdb) c Continuing.
Breakpoint 2, _finish () at test.s:123 123 sw (r31+0), r30 (gdb) s _end () at test.s:125 125 be r0, r0, _end (gdb) x /wx 0xfffc 0xfffc: 0x0000900d (gdb) detach Ending remote debugging. (gdb) quit
In the above run, the compiled code (test.elf) was debugged, as specified on the command line to the GDB program. Connection was established to the already running cpumico32 program in GDB debug mode with the target remote /dev/pts/14 command. The program is loaded into the cpumico32 memory with the load command. We could have loaded the program when running cpumico32, but there is a chance that the program loaded by cpumico32 and that for the gdb session, from whence it gets its symbol information, might mismatch. So loading from gdb ensures that the running program and the synbol tables come from the same source.
Two breakpoints were set; one at _ok7 with a hardware breakpoint (hb _ok7) and another at _finish using a soft breakpoint (b _finish). Execution is started using the 'continue' command (c)—as this is a remote debug sesssion, gdb assumes the target is running already, paused waiting for commands. When the target reaches the first breakpoint GDB halts and displays the source line of the breakpoint. Next the program is stepped (s) to the next instruction, before another 'continue'. The program breaks again at _finish, and another single step taken to complete the program. Memory is inspected at location 0xfffc (which contains the pass/fail code) using x /xw 0xfffc. Since 0x0000900d is displayed, the test passed. Detaching from the remote system (detach) ensures a clean exit by cpumico32, which terminates.
The above example shows the main points in using GDB to control and debug the model and a program running on it but, of course, there are many more features that can be used by GDB that are not shown in the above simple session. Any IDE using the relevant GNU toolchain, including GDB, can be used as a front end to the interface, giving full development capabilities to the model. The LatticeMico System Development Tools use Eclipse, and have remote target capabilities, normally used to connect to a development system. Details of setting this up are beyond the scope of this document, but the diagram below summarises the connections between an IDE (such as Eclipse), the GDB debugger application (for lm32) and the model's GDB interface, via the alternative connections of either a TCP socket or serial connection (using a pseudo-terminal for Linux, or the com0com application in windows).
Support for running in debug mode from the python GUI for cpumico32 is available. An
additional 'Debug' button Compile Options
By default, when cpumico32 is compiled, it has the behaviour as described in the previous sections. However, it can be compiled with various definition in order to modify it's behaviour. There are, presently, two conditional compile definitions that can be set:
The LM32_FAST_COMPILE definition is used to remove as much code from the model, whilst still retaining a viable simulation, in order to maximise the execution speed. To this end, the following features are removed:
• Break point specification removed o Removes command line options -n, -b, -d o Can still break from interrupt callback • Memory wait state specification o Removes command line option -w • Disassemble mode o Removes command line option -x • Removes timing accuracy o No cache modelling of timing o Callback timing information is ignored o Pipeline stalling not calculated • Memory access alignment checks are disabled • Memory stats information is not logged (memory tagging removed) • No watchpoint support • No hardware breakpoint support
With the compile definition, an additional memory restriction applies-memory size must be a power of 2, as the range masking requires this to avoid using a division.
The LM32_MMU definition, when defined duriong compilation, includes all the code for basic MMU support, as added by the M-labs MilkyMist project [7]. Including this code, by default, does not change the model's functionality, as the reset state of the MMU logic is to disable the TLBs and their translation of addresses. However, additional checks are made when the logic is present (such as checking the state of the disable bits), and so the model runs marginally slower if included. If the MMU is not required, then the code can be compiled without defining LM32_MMU. Three additional CSRs appear when the MMU is included, to control the TLBS: TLBPADDR, TLBVADDR and PSW. The first of these (TLBPADDR) is write only, and overloaded with a read-only register, TLBBADVADDR, and they share the same CSR ID [7].
The LNXMICO32 definition simply removes some further command line options and functionality not needed by the lnxmico32 case study program described in detail in the next section. The configuration code (lm32_get_config.cpp) is shared between the lnxmico32 and cpumico32 programs, and the majority of the uses of the definition are found in this file. With the definition active, the -T option is not used, as the test callbacks are not implemented in lnxmico32, which has its own callback functions, used to model peripherals. In addition a -V option is added, but only if LM32_FAST_COMPILE is not defined as well, which acts like -v, but allows specification of a cycle time when verbosity is activated. The LNXMICO32 program loads binary images directly to memory, rather than load an ELF file, so the -f option is also removed.
One other use, modifying lm32_cpu.cpp code, is to remove the test to see if a memory location is an instruction before disassembling it. The lnxmico32 program loads code as binary data via the lm32_write_mem() function, and thus does not label it as instruction data. In order to debug the code, the check is suspended for this compilation option. Case Study: An Embedded Linux System
A case study in the usage of the model is given here, inspired by Reginaldo Silva's Javascript Emulator, in order to demonstrate the features and extensibility of the ISS. A basic, non-mmu Linux system is put together, using the u-boot and µClinux ports to lm32. A minimal system is put together in order to be able to boot the Linux OS, with a light weight Unix environment provided by BusyBox, targeted at embedded platforms.
The diagram below shows the general system layout. It consists of the mico32 model, with two UARTs (UART0 and UART1) and a timer (TIMER0). These are modelled as part of the lnxmico32 environment (see lnxuart.cpp and lnxtimer.cpp), and model the Lattice IP implementations for these functions.
The top level for the system is called lnxmico32, and has a top level source file lnxmico32.cpp. This instantiates mico32 model, shown as the lm32 and RAM boxes in the diagram. It registers its own callback functions for both the external memory accesses (using the model's API method lm32_register_ext_mem_callback()) and interrupts (using lm32_register_int_callback()). The callbacks handle the register accesses to the peripherals, along with the 'ticking' and passing back interrupt status.
When run, the two binary files, vmlinux.bin and romfs.ext2, are expected to be in the directory from which the program is executed-as is, by default, a configuration file, lnx.ini (see next section).
The binary images for the u-boot/µClinux and RAM filesystem are loaded to memory (at 0x08000000 and 0x08400000, respectively), and then memory is updated for hardware setup configuration, and an initial boot command string. The simulation can then be started, and the system boots, sending output characters, via UART0, and, once booted, accepting keyboard input to allow logging in and issuing of commands in the shell (msh-minimal shell). After boot the screen will look something like the following:
To login to the system, login as root, with a password of lattice. To exit from the program, from anywhere, type #!exit! and press enter. ConfigurationThe lm32 model
The mico32 model must be configured correctly for the system to boot properly and, by default, the program, will look for a configuration file lnx.ini in the directory from which it is run. This can, of course, be overridden with the -i command line option. The lnxmico32 program shares a number of command line options of the cpumico32 program, (indeed, it shares common configuration code). The full usage message for the lnxmico32 program is as follows:
Usage: lnxmico32 [-D] [-I] [-r <addr>] [-R <num>] [-l <filename>] [-c <num>] [-i <filename>] [-s <filename>] [-S] [-L]
-l Specify log file output (default: stdout) -r Address to dump value from internal ram after completion (default: no dump) -R Number of bytes to dump from RAM if -r specified (default 4) -D Dump registers after completion (default: no dump) -I Dump number of instructions executed (default: no dump) -c Set configuration word value to enable/disable features -i Specify a .ini filename to use for configuration (default none) -s Specify .sav filename (default lnxmico32.sav) -S Save state on exit (default no save) -L Load saved state before execution (default no load)
The provided lnx.ini options file, for the most part specifies default, but does set the configuration word to a specific value that represents the minimum configuration for lnxmico32 functionality. The file looks like the following:
; ; INI file used for lnxmico32. DO NOT EDIT! ; [configuration] cfg_word=0x00003017
[debug] log_fname=stdout ram_dump_addr=-1 ram_dump_bytes=0 dump_registers=false dump_num_exec_instr=false
[state] save_file_name=lnxmico32.sav save_state=false load_state=false
; When LM32_FAST_COMPILE not defined ; verbose=false ; disassemble_run=false
; [breakpoints] ; user_break_addr=-1 ; num_run_instructions=-1 ; disable_reset_break=false ; disable_hw_break=false ; disable_lock_break=false
; [memory] ; mem_wait_states=0
; [dcache] ; cache_base_addr=0 ; cache_limit=0x0fffffff ; cache_num_sets=512 ; cache_num_ways=2 ; cache_bytes_per_line=4
; [icache] ; cache_base_addr=0 ; cache_limit=0x7fffffff ; cache_num_sets=1024 ; cache_num_ways=2 ; cache_bytes_per_line=4
Some of the options (those commented out) are only available if lnxmico32 is not compiled with LM32_FAST_COMPILE defined, which disables disassembling, breakpoints, memory wait states and cache timing simulation. These can be reinstated when compiled without the definition, but will cause a warning if uncommented when compiled with it defined. Using the GUI
As for cpumico32, the python GUI lm32.py (see GUI for cpumico32 section above) has support for lnxmico32 to configure the model. The main display defaults to cpumico32, but tabs at the top select between this and lnxmico32.
When lnxmico32 is selected, the layout is similar to that for cpumico32 (and most options are common), but with some changes relevant to this program. The main differences are the save state and load state flags (in place of the internal callback enable), the deletion of the memory configuration entries (it is fixed in this model), and the specification of the the state save/load file with a browse button (in place of the program file entry—an informative only entry).
It should be noted that the common flags and entries on each tab are a view onto the same data. That is, if a flag or entry is changed in one view, it will have been changed in the other view as well.
Just like for the cpumico32 tab, selecting 'fast mode' from the menu will disable and grey out those options that are no longer relevant. When the script is run, and the lnxmico32 tab is selected, the window looks something like that shown below:
The system software
To configure boot and OS software before running, three things need to happen:
The hardware setup table consists of a consecutive list of structures, with one for the CPU, the memory, the two UARTs and the timer. This is followed by a termination structure. Each structure has a similar format
struct { uint32_t length; uint32_t id; . . <specific payload> . . }
The length gives the size of the entry (including the length bytes), and the ID is a unique number. The payload for each of the entries also have similar structures (except the terminator), with a 32 byte string array containing the name of the instance (which can be shorter, but not longer, than 32 bytes), followed by parameters for the particular device. The terminator is just a length (8) followed by an ID of 0, with no payload.
For the CPU ("LM32") the payload is simply a 32 bit number for the clock frequency, in Hz. The memory ("ddr_sdram"), has a parameter for the base address, followed by the size in bytes. The timer ("timer0") has a 32 bit word for the base address, then four bytes for a write tick count, read tick count, start/stop/control and counter width. A following 32 bit word specifies the number of reload ticks, and the a byte giving the interrupt number (i.e. which of the 32 bit external interrupt pins it is connected to). The structure is then padded to a 32 bit boundary with bytes of 0 value.
The UARTs ("uart0" and "uart1") have a base address and baud rate parameters (both 32 bits), followed by 8 bytes for number of data bits, number of stop bits, interrupt enable, block on transmit, block on receive, RX buffer size, TX buffer size and its interrupt number. More information can be found in Appendix A of the "Linux Port to LatticeMico32 System Reference Guide" [3].
These hardware setup structures are written consecutively to memory, starting at 0x0BFFF000, in the order, CPU, memory, timer0, uart0, uart1 and the terminator.
The command line string is used as the u-boot command arguments when starting the system. For lnxmico32, this is
root=/dev/ram0 console=ttyS0,115200 ramdisk_size=16384
Finally, the general purpose registers GP1 to GP4 are pre-charged with four addresses, based on the above configurations. If these were invariant, then a small assembler program could be added in memory that set these values and then jumped to the system entry point, with the initial entry point being this initialisation program. However, to ease modification to system parameters, these are written directly, using the lm32 model's lm32_set_gp_reg() method. GP1 to GP4 are set to have the following addresses: The h/w setup base address, the command string base address, the RAMFS load start address, and the RAMFS load end address + 1.
Having configured the system, the execution of the code can begin.
Use of Callbacks
The lnxmco32 system registers two callbacks with the lm32 model; one for memory accesses (ext_mem_access()) and one for ticking/interrupt generation (ext_interrupt()).
The first of these (ext_mem_access()) intercepts all memory accesses to the peripherals-the timer and the two UARTs. It separates out the address passed in by the lm32 model into a page address (in this case a 4KB page), and offset within that page. If the page address matches the base address of one of the peripherals, it processes the address, otherwise it simply returns with a LM32_EXT_MEM_NOT_PROCESSED status, informing the model it must handle this access.
All the peripheral models for the lnxmico32 system provide three functions: a read function, a write function and a tick function (see next section). The memory callback function is called with an address and an access type. If the access type is LM32_MEM_WR_ACCESS_WORD, then the selected peripheral's write function is called with the offset address and data value. If not, the read method is called with the offset address and a pointer to the data variable in which to return the read value.
When the address is matched by the callback, a processing time is returned, so that the lm32 model can advance time accordingly with the delay of the access. In lnxmico32, this defaults to 1 cycle for all peripheral register accesses.
The tick/interrupt callback function (ext_interrupt()) is called regularly by the lm32 model, with a timestamp. The callback returns an interrupts status in a 32 bit word, with each bit representing an external interrupt pin on the mico32 processor, of which there are up to 32. Each time the function is called, it calls each of the tick functions for the peripherals. For the timer this is a function that simply takes the time as an argument, and returns true or false to indicate whether it is interrupting or not. For the UARTs, they take additional parameters to return termination request status, indicate whether it is the keyboard UART and its context. The context is needed, as the function's code is common to all UART instantiations, but supports up to 4 different contexts, and identifies whether UART0 or UART1 calls. Like the timer tick function, the UART tick function returns a Boolean, indicating interrupt request status.
The callback function ORs together all the interrupt statuses of the peripherals, which is returned when the function exits. The termination request statuses of the UARTs are also combined, and if a UART is requesting termination, the value returned in the wakeup_time pointer is set as LM32_EXT_TERMINATE_REQ, indicating to the lm32 model that an external termination is active. If no termination, a wakeup time of the current time plus LM32_INTERRUPT_GRANULARITY (1000 cycles in this case), is returned. This means that the tick function will not be called for at least 1000 cycles (plus a bit to, say, complete an instruction). This might be set to 1, so it is called after every instruction, but the rate of activity for these peripherals is not that high, and would produce unnecessary processing overhead. A granularity of even higher might be possible, but 1000 seems to give little noticeable overhead in processing speed. Peripheral Models
There are two peripheral models implemented for the lnxmico32 system: a timer and a UART. Both provide three interface functions:
void lm32_<peripheral>_write
(const uint32_t address, void
lm32_<peripheral>_read (const uint32_t
address, bool
lm32_<peripheral>_tick (lm32_time_t time,
The two register access functions are fairly self explanatory, with an address, and either a data value passed in for writes, or a pointer passed in for returning the read value. All accesses are for 32 bit words, as all the registers for the peripherals are aligned to 32 bit word boundaries.
The tick functions all have a time parameter input, and a context value (cntx), for selecting the particular instance of the peripheral (up to 4 of each), with a default context of 0, allowing this parameter to be omitted of only one peripheral instantiated, as for the timer in lnxmico32. The UART model also has a terminate parameter (passed by reference) and a kbd_connected input flag. The terminate parameter allows the UART to request termination of execution by setting this parameter to true. This done if the user types a certain sequence of characters as input to the UART, flagging indication of termination, and allowing the program to exit cleanly with any post processing requirements, such as dumping registers etc. The keyboard flag input enables internal processing of keystrokes as RX data to the UART. As only one UART can process the single keyboard, this flag enables the nominated UART to process key stroke inputs, whilst the others ignore them.
The timer model simulates the behaviour of the Lattice timer IP [4], implementing the four registers to control operation, the counter and the generation of an interrupt, when the counter reaches zero. The counter can continue or stop, depending on the register control settings.
The UART model simulates the behaviour of the Lattice UART [5], implementing the 8 registers. Transmission modelling is the much simpler functionality. When the processer writes a byte to the transmit holding register, the byte is passed straight on to stdout, via a putchar() call. However, timing is simulated, and the status bits are cleared to indicate that there is no space for another byte. The timer model's tick function notes the time when transmission status goes active, and counts until the transmission time has passed, before setting the status back to allow further transmission. The time calculated is a function of the configured BAUD rate and the clock frequency, and assumes a start, parity and stop bit, on top of 8 bits of data (i.e. 11 bits). When the status bits indicate that the TX buffer is empty once more, if enabled, the model generates an interrupt, which is returned as a true status when the tick function exits.
For keyboard input, each time the tick function is called (and the kbd_connected flag is set), the model checks if a key has been pressed, and fetches the byte value if it has. This is placed in the RBR register and the "data received" status set. If interrupts are enabled for a data reception, a interrupt status of true is returned by the tick function. As well as simulating keyboard input for the system, the model also monitors the input to detect for a specific sequence of key strokes. If the input sequence matches a particular string ("#!exit!<enter>"), it sets, to true, the terminate parameter passed in (by reference) to the tick function call. The system model can choose to ignore this, but in lnxmico32, this request is passed back to the lm32 model to terminate its execution as a user breakpoint.
Save and Restore
The lnxmico32 program has the ability to save the state of the system on exit, and to reload that state on re-running to restore the running system to exactly where it was upon exit. In order to do this, the state of the CPU, memory and of all the peripherals must be saved and restored. The lm32 model already has two methods to support this, as documented previously:
• lm32_get_cpu_state() • lm32_set_cpu_state()
These two methods transfer state within a single object of type lm32_cpu::lm32_state. The CPU model has been designed so that it keeps all relevant internal state within a structure of this type, and it is returned or set as a single structure, so that the calling program need not know what state to save, or even its details. The returned state can be pointed to by a pointer to bytes, and saved as a byte stream to the size of the type. The CPU state does not contain the contents of the memory, as this can be large and needs to be handled externally, using the read/write methods of the CPU model, for optimal handling (more below).
The UART and timer peripherals of lnxmico32 have followed the same practice as the CPU model, and have single structures containing all the relevant state (with defined, and exported, types lm32_uart_state_t and lm32_utimer_state_t), and methods for retrieving them and restoring them:
• lm32_get_timer_state() • lm32_set_timer_state() • lm32_get_uart_state() • lm32_set_uart_state()
The state returned by the peripherals contains the state for all the contexts that the peripheral code supports, and not just a single context whether the context has been used or not. This simplifies the save and restore, and makes the returned data size fixed in all cases. The amount of data is small (compared to the memory image), and so has little overhead. Since the data is fixed size, it is saved completely raw, with no additional information, such as size or target peripheral. The format of the .sav file has a fixed order of data (see below), so that on restore it is known what data is expected next, and its size inferred. Saving of memory
The memory of the lnxmico32 program is fairly large at 64MB. A large proportion of this contains the invariant boot and OS programs, and the filesystem ROM image. As these can be reloaded on restore runs, the data in these locations need not to be saved. To make saving of data more efficient, the memory callback function, which is called for all CPU memory accesses, monitors for any write access to the RAM. The RAM, for this purpose, is divided up into 1K pages and a tag kept on each page, setting a flag to true if a write access is made on that page. The size of the page is a compromise between granularity of save data and the size of the tag array. This can be altered without change the function's integrity.
When a save operation is performed, only the pages in RAM that have had a write access are saved. Since the tag array is cleared after that OS and FS are loaded, only subsequent writes are recorded and the pages saved. Since the page sizes are fixed, only the address of the page needs to be pre-pended to the data. This is saved first as four bytes, with MSB format. By forcing this format, the data is independent of the host, and its byte ordering, on which it is run. The data, then, is saved as a set of consecutive addresses and 1K binary data images.
The File Format
As mentioned above, the peripheral data is fixed size. Also, the CPU state comes as a fixed size object. The RAM data is a dynamic set of pages, which will vary from save to save. The file format was chosen to place all the fixed sized data first, and then followed by the RAM data, avoiding the need to delimit the fixed sized data, though the order becomes fixed. The format of the .sav file is as shown below:
Control
By default the state is saved to a file lnxmico32.sav. This can be changed to a different file name by using the -s command line option, or the save_file_name parameter in the [state] section of the .ini file. Saving of state is enabled with the -S command line option or save_state, and loading of previously saved state is enabled with the -L option or load_state.
When both saving and restoring are enabled, the affects are accumulative. That is, each load will re-mark the RAM pages that are restored to, with new pages accessed added on top of this, and so on. This is needed as there is no guarantee that all previous pages will be accessed on each new run.
Performance
Performance measures were made using the Linux system model, as this is sufficiently complicated, and representative of a real system, as to yield meaningful results. The system was tested for all supported platforms (as documented previously), with the addition of MSVC Community 2015.
The platform used was an Intel® i7 920 CPU, running at 2.67GHz, with a system having 6GB RAM on an ASUS P6T SE Motherboard. The test was to run lnxmico32 -I, boot Linux, login as root and exit, which yielded a test of > 400 Million instructions.
Compilation for the Microsoft Visual C environment was all done with the 'Release' mode. For the gcc compilations, optimisation options '-Ofast -fomit-frame-pointer -march=native' were used.
The results are summarised in the table below:
The surprising result here is that the Cygwin 32 bit compilation comes out on top, rather than the native 64 bit Linux system (Ubuntu)—though this situation is reversed when not compiled with LM32_FAST_COMPILE. Since Cygwin is a 32 bit compiler, and Ubuntu is 64 bit, additional differences may arise from this, though the 32 bit Ubuntu compile was the worst of all. However, compiling for 64 bits in MSVC improved the situation over 32 bits, and the same might be expected for GCC. Unfortunately 64 bit Cygwin was not available at the time of testing, and so a complete analysis has not been done for these differences.
So, focussing on the best result, the system runs at around 45 MIPS, when compiled with LM32_FAST_COMPILE, which yields a 57.6% improvement over the fully featured model. The speed of the model will very much depend on the nature of the code being executed, and the profile of the particular instructions, and so the results documented here are only a rough guide of 'best' performances for a limited, though not contrived, test. Multi-processor System Modelling
In this section is discussed the method for constructing a system model with multiple instantiations of the CPU model, to create a multi-processor system. Note that, to date, the model has not been tested extensively in this manner, but the model is designed to be able to support this, and the recommended method is described here.
Running Models Concurrently
In the case study described in the previous section, a single model is instantiated, and is run by calling the model's lm32_run_program() method with an exec_type argument set to a value of LM32_RUN_FROM_RESET. This means that the CPU model will loop internally, executing instructions indefinitely, until such time as the registered external interrupt callback functions signal for a termination (returning a negative wakeup time), when the model will return from the function call. Using this method when requiring multiple CPU models to be running concurrently would require having each model running in a separate thread, with all the complexities that that would entail. Fortunately this is not required.
The model has two other execution types that can be used to enable concurrency: LM32_RUN_SINGLE_STEP and LM32_RUN_TICK. The differences between these two types is explained in the Execution and Breakpoints section but, in summary, the first steps one instruction, whilst the second advances the clock by one tick (which may, or may not execute an instruction, if waiting for the last to complete). The single stepping is the simplest and quickest way to advance the model but requires time synchronisation between the models (more below), whereas the ticking advances a known time (one cycle), but the models will needs calling more frequently. Note that ticking assumes that the timing model is enabled within the model. When compiled with LM32_FAST_COMPILE, for instance, the timing model is disabled, and a tick call and an instruction call are one and the same thing. In this case LM32_RUN_SINGLE_STEP should be used, as the clock state is not updated.
When calling the run methods with either the step or tick execution type, the model will return after just one instruction or clock cycle. When multiple models are instantiated, these can be called within an external loop, one after the other, with either a step or tick execution type (don't mix the type between models though). Termination of this external loop is up to the implementer, but the status returned by the calls to the model can be inspected, and breaking the loop could be based on one or all of them requesting termination. Synchronising Time
Running the models with an active timing model, but using stepped execution type (for speed), can cause drift in time between models if this is not managed. This is because instructions take different times to execute, and unless the models are all running identical programs, the state of their clocks will advance differently. In this case, the external program's loop needs to inspect time, and run the models appropriately.
The CPU model has a method to inspect time: lm32_get_current_time(). On the first loop, all model are stepped, and their time inspected. On the next iteration, the CPU with the earliest time is the one to be run, and any others that have this same earliest time. Any with a time in advance of this are not run. This continues on all subsequent iterations, until termination. This ensures that the CPUs are never more than a few cycles adrift, and keeps them in sync, whilst allowing reduction in the number of calls to the models from a pure ticking model. Whether a ticking model is better than a stepping and synchronising one is a matter of circumstances and preference. Shared Callbacks
Any system model using the lm32 model will have to have memory and interrupt callbacks registered in order to model external peripherals etc., as for the Linux case study described earlier. If a multi-processor system is to have completely different functionality implemented in each of the callback methods, then different functions can be registered for each of the instantiated CPUs. However, if the CPUs have shared functionality, such as modelling connection to a shared bus, with shared access to memory and peripherals in a common address space, then something else needs to be done.
The model does not return an ID when calling its registered callback functions, and so a method is needed to identify which CPU is making the call, if the callback code is to be shared. The idea here is to have the common code in a separate function, not registered with the models, but with an addition of an ID parameter. Individual 'wrapper' callback functions are registered with each separate CPU which simply calls the common code, with the addition of the ID for the particular processor. It is then up to the common code to keep separate contexts for each processor, where necessary, or access common state. The diagram below illustrates this concept:
Shared Memory Space
As mentioned in previous sections, the model can have an internal memory, with controllable size, and memory space offset. This memory is separate for each CPU instantiation. The internal memory can be configured to be all, or partly, removed, and the memory callback functions trap and process memory addresses across all or part of the modelled space. To share an address space, whether mapped to memory, or to peripheral registers, the external memory callback functionality processes these addresses, and models the functionality.
For shared space, the external model common callback code must access the common state, regardless of the ID passed in. If modelling state unique to each processor, it must switch context based on the ID. One can also envisage state that is common between a subset of processors, but separate to another subset.
A similar sharing of interrupt sources can be envisaged for the interrupt callback as well, where some external interrupts raise an interrupt pin on all the CPUs (for a broadcast mailbox function, say), or be CPU specific (for a private peripheral, for example).
In this manner, it is possible to set up any arbitrary system of shared or particular memory and peripheral set between multiple CPU instantiations. Internal RAM can be used for private memory (modelling data and/or instruction TCM, say), with external callbacks mapping shared memory and peripherals to the appropriate CPUs. The CPU's program code can be located either privately in internal memory, or be common to multiple instantiations, as required. Such an example system is illustrated in the diagram below:
In this example three processors have access to shared memory and peripherals A and B (and any other on this bus). The third processor also has access to peripheral C, but has no internal memory. Thus, access to shared memory and peripherals A and B are handled by the common callback code, without regard to ID. All memory accesses from the third processor must be handled by the memory callback (as it has no internal memory), and peripheral C is only accessed when receiving an ID for the third processor, otherwise the access is marked as unprocessed. Not shown, but similarly for interrupts, it can be envisaged that one or more of the peripherals on the common bus could interrupt one or more processors as necessary. Peripheral C, however, would only interrupt the bottom processor. So two memory busses, and two interrupt busses are modelled, and can be extended at will. Downloads
Appendix A: Running and Debugging with the Model in an IDE
In the GDB Interface section, it was indicated that, having connected the model to GDB, it could therefore be integrated with IDEs such as Eclipse. In order to do this, some configuration is necessary. In this appendix an example of configuring Eclipse is given using the simple_c example provided with the package. The example is for the Linux environment (Ubuntu 16.04LTS) and for the Oxygen version of Eclipse. The configuration details are similar under Windows and various previous versions of Eclipse. Compile model and code
The simple_c example requires input and output, and thus a UART model, so this configuration is going to use the lnxmico32 model which has the appropriate peripheral support, which cpumico32 does not. By default, building the lnxmico32 model will generate the fast compilation version, which lacks the debug features necessary to integrate to GDB and Eclipse. Therefore, the build must remove the definition of LM32_FAST_COMPILE, set in the file makefile.lnx. From the model's root directory, building should be something like the following:
make -f makefile.lnx clean && make -f makefile.lnx LOCALOPTS="-DLM32_MMU"
The -DLM32_MMU is optional, but is defined in the makefile.lnx file. In MSVC, under the debug configuration LM32_FAST_COMPILE is not defined, and so the debug version should be used, rather than the release version.
The simple_c example must be built as well, to generate simple_c.elf, and this is simply a matter of going to the code's directory location and performing a make:
cd examples/simple_c make
Note that, by default, the example is built with CRT_DISABLE_CPU_RUN_INDICATOR defined, as required for debugging with the model. If a build exists without this defined (targetted at a hardware platform), then a make clean should be performed first, and the code rebuilt. Eclipse
Having built the model and the example code to specification for debug, Eclipse must be run and a project created and configured. It is assumed you have Eclipse installed with the CDT (C Development Tooling) extensions (https://eclipse.org/cdt/). Create Project
Create a new project with File->New->Makefile Project with Existing Code. The window that appears should have the name simple_c, and the Existing Code Location updated using the Browse button, and navigating to the <mico32 root>/examples/simple_c directory. The Toolchain for Indexer Settings should default to <none>, or should be set so if not already.
Configure Project
The project just created must now be configured. Here we are going to set up some paths for the code, specifically for the ancilliary driver code, and then specify the debugging criteria.
In the Project Explorer (from the C/C++ view) right click on the simple_c project, and select Properties. In the window that opens, select C/C++ General->Paths and Symbols. The Includes tab will show three Languages (Assembly, GNU C, GNU C++), and we should update all three to include the path to the <mico32 root>/drivers directory. This is done (in all cases) using the Add. button. A window appears for a place for the directory (use the File system. button , if preferred). Check the Add to all languages box, then all three shown languages are updated at once.
Next, the debug configurations are set. Choose Run->Debug Configurations.. From the window a new C/C++ Remote Application is created by right clicking the appropriate entry in the lefthand pane, and selecting New. Assuming the simple_c project is still open and selected, the right hand pane should show details of the new project, and have some fields already filled in.
From the Main tab, the C/C++ Application field should be updated by browsing to the location of the previously built simple_c.elf file in <mico32 root>/examples/simple_c/ directory. In addition, Disable auto build should be selected.
By default, Eclipse will usually select Using GDB (DSF) Automatic Remote Debugging Launcher. This would be for connecting to a remote server and launching and configuring gdbserver on the remote system. This is all taken care of by the model's GDB interface, and so we need Manual mode. To change click Select other. and, in the resultant window, check the Use configuration specific settings, and select Using GDB (DSF) Manual Remote Debugging Launcher.
Many of the fields in the configuration window's Main tab should now disappear. When this is all configured, the window Main tab should look something line the following:
Now select the Debugger tab to configure the debugging program, and connection details. In the Main sub-tab, the GDB Debugger field should be changed to lm32-elf-gdb. This assumes that this tool is in the search PATH. If not, then the Browse button can be used to navigate directly to the executable. The GDB command file field should be blanked, unless you wish to specify some commands. Note, however, that not all possible commands will work properly (such as connecting to remote target and loading code), as after the command file is run, Eclipse will send commands to gdb to do connections to remote target, and the user commands can interfere with this with out of order issues.
The Connection sub-tab must then be selected. In this example, the Type is chosen as TCP, the Host name or IP address field should be localhost, and the Port number is set to 49152 (0xc000 in hex—the first unreserved port number). You can, of course, choose a different port number and even select a Serial connection—the model supports all of these.
It is up to you whether you wish to Stop on startup at: main. You can uncheck this, or change to some other location, such as _start—the entry point in crt0.s. When configuration is compete, click Apply, and close the Debug Configurations window. On completion, the window should look something like the following:
Debug Code
Having chosen a manual remote debugger launch, we must fire up the model ourselves and load the target code.
cd <mico32 root>/examples/simple_c ../../lnxmico32 -tG 49152 -f simple_c.elf
A message should appear: LM32GDB: Using TCP port number: 49152, indicating the model is waiting. The debugging session can now be started. Select Run->Debug Configurations., and chose simple_c Default and click the Debug button at the bottom right of the window. If all went well, the model should have printed a message:
LM32GDB: host attached.
In Eclipse, the main windows should show the code stopped in the main() function, ready for debug. All the facilities for debugging sould name be available for stepping code, setting breakpoints, and inspecting state etc. When run once Debug Configurations., it can be run again much more simply using the 'Bug' icon in the tool bar. The pull-down menu from this has the last few runs listed, and simple_c Default can be slected directly from here.
When debugging is finished by pressing the stop toolbar button, you can check the model exited cleanly as the following message should have apperaed, and the executable exited.
LM32GDB: host detached or received 'kill' from target: terminating.
For each new debug session, the model must be relaunched manually before running the debugger again. This is all that is needed to integrate the model with Eclipse, and debug a program, but Eclipse can be, configured to launch the model automatically, before running the debug session, avoiding the need to run the model from a command line prompt each time. This is optional, but makes for more convenient debugging. Launch group for running model and debugging
To automatically run the model before debugging in Eclipse we must create a Run configuration to execute the model, and then a Launch Group to combine the model execution with the debugging session. The run configuration is similar to the debug configuration set up as described previously. To create a Run configuration for lnxmico32 select RUN->Run Configurations., and create a new C/C++ Application, naming it lnxmico32. On the Main sub-tab, for the C/C++ Application field, Browse. to debug build of lnxmico32. Also, disable auto build. In the Arguments sub-tab, set to:
-tG 49152 -f simple_c.elf
Even though we have made a Run configuration, an issue arises when it is executed where it appears to still stop at start up. To avoid this, open up Debug Configurations, in which lnxmico32 will also appear. Select and navigate to Debugger sub-tab, and uncheck Stop on startup at:.
Now we have created a Run configuration for the model, this needs to be combined with the simple_c debug configuration, previously detailed, within a Launch Group. Select RUN->Run Configurations. and create a new Launch Group which we can also name simple_c. In the Launches sub-tab click the Add. button. In the pop-up window, select a Launch mode of run, and from the C/C++ Applications select lnxmico32, and then change the Post launch action to be a Delay of 1 second. OK this configurations, and then repeat an Add., but this time adding simple_c Default from the C/C++ Remote Application. This needs a Launch mode of Debug, and a Post launch action of None. The resultant window should look something like the following:
This new Launch Group can be run just like for the Debug configuration, but now it will run first the lnxmico32 configuration which will start the model, and then after a second delay, run the debug session. Consoles are created for the configurations, and one will appear for the model for general I/O. Further Reading
[2] Using as, the GNU Assembler, version 2.19.51, Free Software Foundation, 2009 [3] Linux Port to LatticeMico32 System Reference Guide, 2008, Lattice Semiconductors [4] LatticeMico Timer, version 3.1, 2012, Lattice Semiconductors [5] LatticeMico UART, version 3.8, 2012, Lattice Semiconductors [6] Stallman et. al., Debugging with GDB, 10th Edition, Free Software Foundation, 2012 [7] LatticeMico32 Memory Management Unit,
M-Labs, 2013, Copyright © 2016 - 2019 Simon Southwell simon@anita-simulators.org.uk | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||